大家在观看嫦娥六号落月以及上升器从月背起飞的视频时,会感到画面又模糊又卡顿,对比50多年前美国阿波罗号从月球起飞的视频画面,好像质量差了很多,是因为中国目前的技术还不如当年的阿波罗吗?
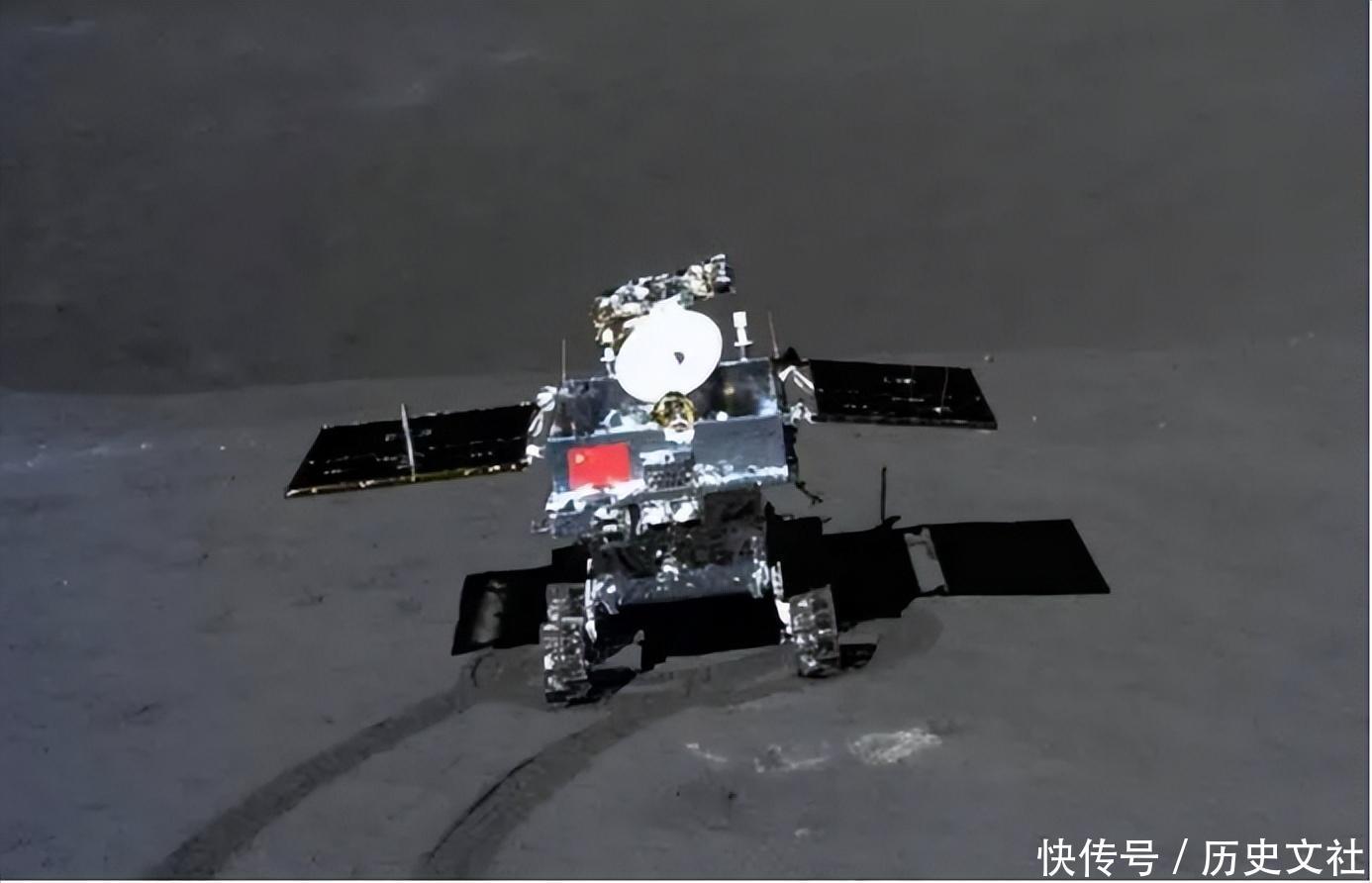
在弄清楚这个问题之前,不妨先看一张嫦娥六号在月球背面的照片,很多人第一次看到这张照片,还以为是虚拟图片,实际上,这是一张在月背现场拍摄的真实图片。
那么问题来了,这张照片是谁拍的?嫦娥六号只有着陆器和上升器降落在月球表面,照片里这两部分都在,还有谁能拍照呢?

嫦娥六号的“小跟班”
再仔细观察这张照片,会发现左下角有一块阴影,从拍摄者到着陆器之间,有一道很明显的车辙,没错,这位“摄影师”不是别人,而是嫦娥六号所携带的一辆月球车。
此前,嫦娥三号携带的玉兔一号是我国第一辆月球车,这辆车在工作一个多月后就无法再继续行驶,但它所携带的各种载荷仍然可以正常运行,一直工作了972天,非常出色的完成了任务。
嫦娥四号所携带的玉兔二号则是出了名的“老寿星”,已经在月背行驶超过了1596米,工作了五年多,至今还在正常工作。
而嫦娥六号所携带的月球车,则和它的前辈有很大不同,单从个头上来说,玉兔一号、二号都达到130多公斤,和一个成年人的体重差不多,而嫦娥六号的这辆月球车,仅有5公斤重,不知道的还以为是一个儿童玩具。
另外,它的“学名”也不叫月球车,而是叫“月面自主智能微小机器人”,到目前,人们了解到的功能就是帮助嫦娥六号拍照,但实际上,这个“小跟班”很可能藏着大秘密。
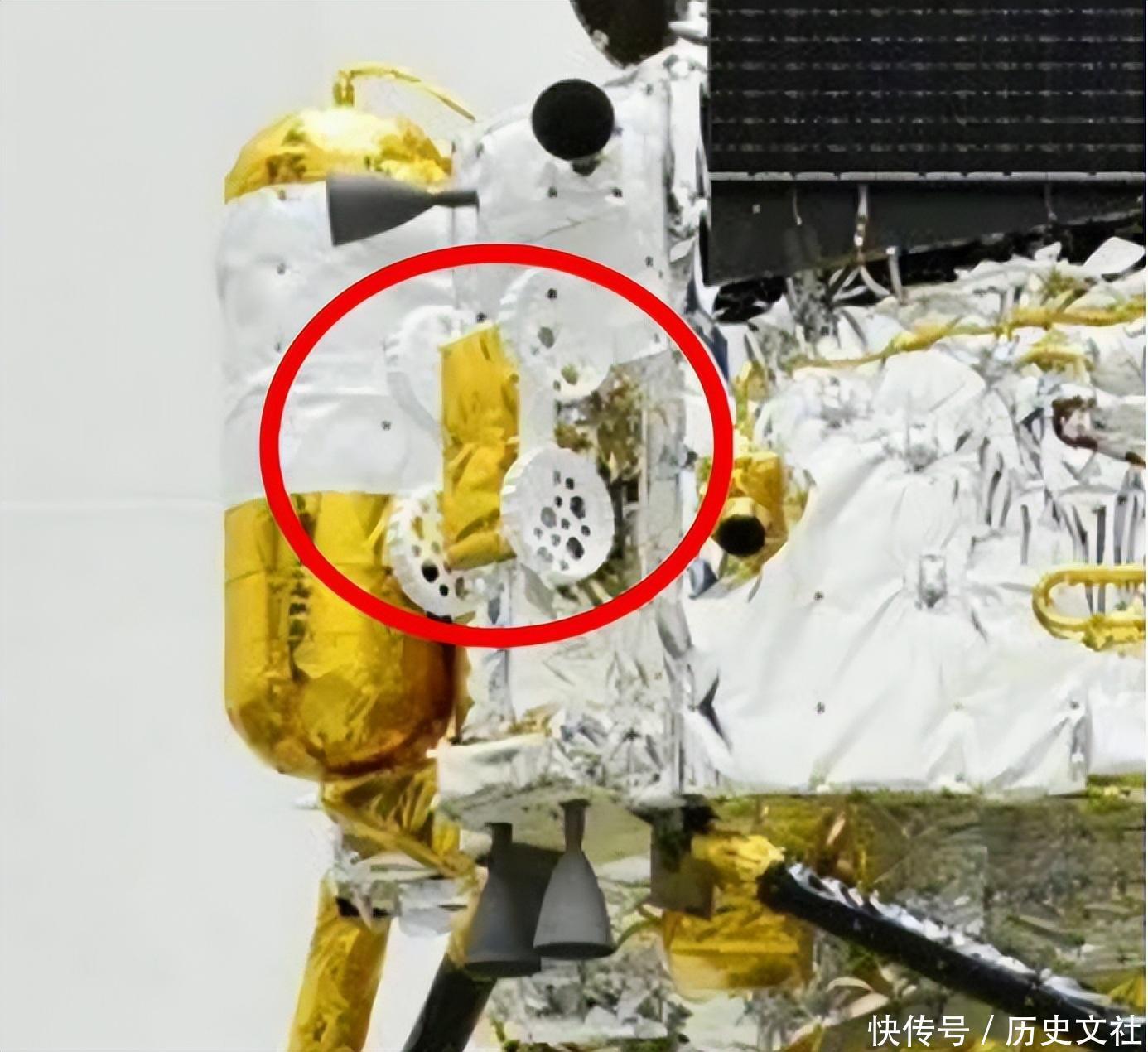
在嫦娥六号着陆之前,这台像一辆四轮小车一样的“机器人”就悬挂在着陆器的侧板之外,直到嫦娥六号完成月背采样之后,它才会来到月表,向前驶出一段距离,然后转过身为嫦娥六号拍照。
那么,它是怎么从着陆器上下来的?自己驶出去之后,又是如何确定距离,给嫦娥六号来一张全身照的?
这个“微小机器人”是由航天科技集团五院研制的,用他们的话说,这一切动作都是“自主智能”完成的。

微小机器人会在收到信号后自主从着陆器上分离落下,而且自动调整姿态,选择行动路线,然后自主选择拍摄位置、拍摄角度,并对构图画面进行优化,拍摄完成后,会将图片传回嫦娥六号,再传回地球。
根据五院的介绍,自主智能技术将是未来深空探测的重要技术,这次利用嫦娥六号着陆月背的机会,可以进行完美的测试。
至于这台“微小机器人”能在月球上正常工作多久,目前还无法预测,除了拍照是否还有其他的一些功能,目前也没有确切消息。
既然有这样高科技的东西,为何我们收到的视频画面如此模糊卡顿呢?
视频卡顿的原因
嫦娥六号最突出的成就就是在月背采样,但在月背进行起降的难度,比月球正面大太多,首当其冲的就是通信问题。
有种说法,鹊桥二号中继星,就相当于我国月背探测的“开关”,有鹊桥二号在,月背探测就能进行,如果鹊桥二号出问题,一切都将失败。
所有地面与月背之间的指令、信号,都需要鹊桥二号进行中继收发,相比它的前辈鹊桥中继星,传输速度已经有了质的提升,达到每秒10Gbps,相当于一秒钟可以传输两部高清电影。
但即便如此,庞大的数据量依然会占据相当多的传输通道,这是因为嫦娥六号在着陆过程中,需要根据月背的实际情况选择最佳着陆点,在短暂的时间内必须将大量数据在地月之间进行传输,自然会将更多的通信资源让给这些实际有意义的数据,而不会去纠结图像是否连贯。
此外,我们看到的嫦娥六号在着陆过程中所拍摄的影像,应当是最原始的,画面是航天技术人员所使用的测控信号,没有经过任何的处理,这种一帧一帧卡顿的画面,更有利于技术人员判断出现的变化,他们所需要的影像并不是“电影”,而是实时信号。

如果仔细观察就会发现,嫦娥六号着陆过程中的影像,并非不清晰,而是在普通人看来,比较单调枯燥,里面的信息量实际上是非常大的,对细节的表现也很丰富,这都是在着陆之前,为选择着陆点而进行的信息收集。
嫦娥六号在月背的时间只有49小时,需要进行大量的工作,这种情况下,我们的航天工作人员自然会以完成所有预定科学研究任务为第一要务,至于拍摄的影像,适当牺牲一些清晰度也是可以的。
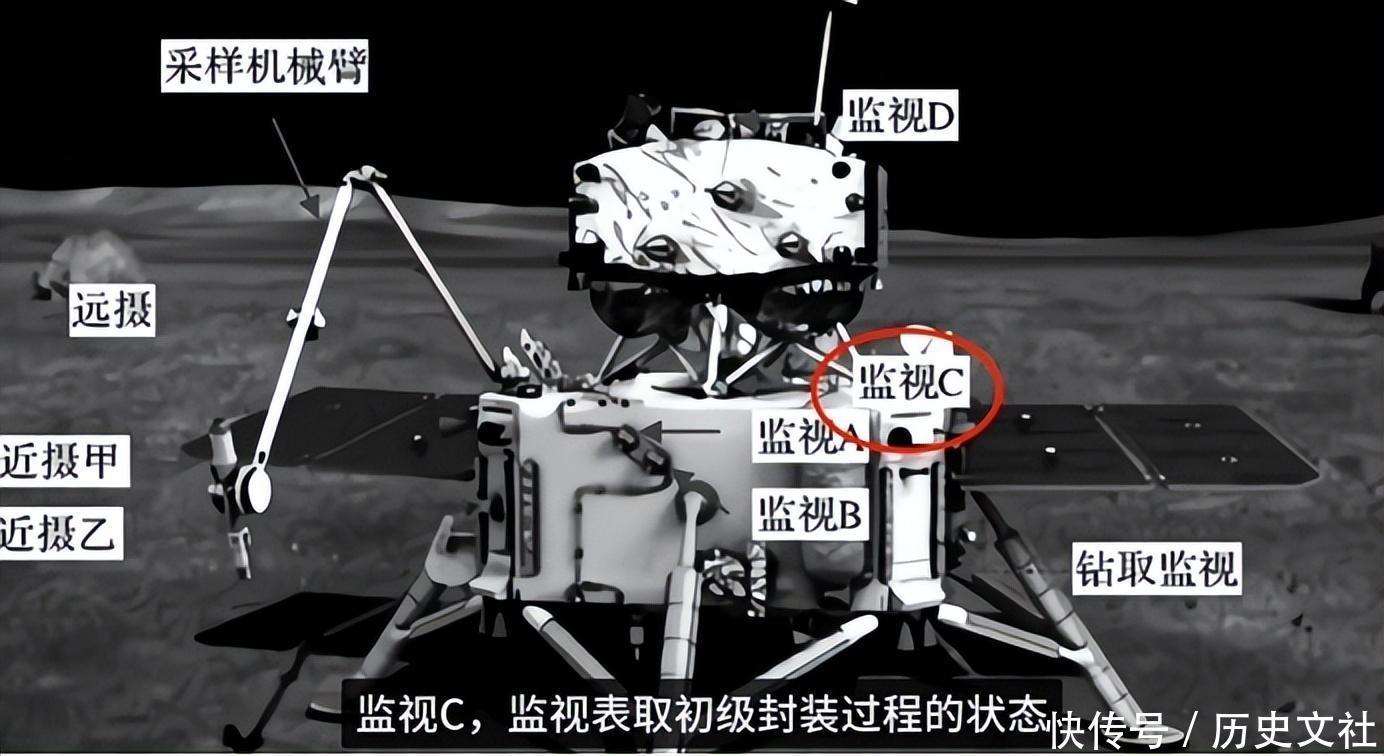
实际上,除了行驶出去拍照的“微小机器人”,嫦娥六号自身还装载有八个相机,从各个方位进行了监测,只不过它们的任务并不是把画面拍得好看,而是只要达到监测的目的就可以了,没必要过多占用信号传输资源。
再来看当年阿波罗11号的直播,画面是黑白的,分辨率只有320P,帧数只有10,这是非常模糊的。
阿波罗17号的起飞画面要好一些,达到每秒30帧,彩色画面,这种模拟电视信号相当于100K每秒的网速,这就是50年代时的技术水平。
并且,美国并非每次阿波罗探月都有拍摄,阿波罗15、16号的拍摄都失败了,只有阿波罗17号的起飞画面被记录了下来。

至于我们看到的一些很清晰的美国登月的影像,则是宇航员在月球上拍摄下来的,使用的是胶卷摄像机,这些影像在回到地球之后又经过了翻拍处理,自然会很清晰,但这不是直播。
总而言之,嫦娥六号并没有太多拍摄影像资料的计划,所有的动作,都是在为完成“主线任务”服务,其他的能省则省,毫不拖泥带水,目标明确。
在某种程度上,这也和我国目前地面上的深空测控工作有一定关系。

我国的深空测控站
在太空探索当中,要想全方位接收来自深空的信号,就需要在地面建立覆盖全球的测控系统,也就是深空测控站。
当然,只要在地球上一些重要的节点布置测控站,就可以进行有效的信号传输,不过最完美的自然还是覆盖全球。
我国在海外的测控站并不多,主要是在阿根廷、巴基斯坦、澳大利亚、纳米比亚等国,这些测控站实在是不够用,所以我国还有一批“远望号”远洋测控船,行驶到指定的海域开展工作。

这些测控船每年要在海上漂泊200多天,非常辛苦,但对我国的航天事业起到了极大的促进作用,由于常年出海,很多船只锈迹斑斑。
此外,根据一些不同的航天科研任务要求,我国还会向国外租借测控站,来帮助我们顺利完成任务,例如我们就曾租用过法国、瑞典等国的测控站。
目前,从全球范围来说,北美地区是我国现在的盲区,原因自然是因为美国,中国想在美国建设测控站是不可能的,哪怕是租,也不可能。

为此我国只能在南美的阿根廷建设测控站,但却遭到美国的各种阻挠,恶意猜测该测控站有军事用途,指责中国用它来收集美军敏感信息,还有人以阿根廷“进步团体”的名义,跑到我国测控站进行抗议活动。
同时,美国还在我国测控站附近建设了他们的军事基地,利用雷达等设施对我测控站进行监视,并要求阿根廷政府对我测控站进行调查,当真是无所不用其极。
当然,调查的结果证明我国测控站仅作为民用科研使用,尽管如此,美国对我国海外仅有的几个测控站依然是虎视眈眈。

在这种情况下,我国一些重大的太空科研项目,恐怕就必须要有一些“防人之心”了,一旦在最关键的时刻,信号突然中断,所造成的后果是无法想象的。
美国在全球有数百个军事基地,而且航母编队也足以确保某一区域的安全,所以美国在制空制海权的保障下,可以在全球开展他们的太空科研工作,包括一些太空飞船,就可以直接采用海面降落的方式进行,而不必担心出现意外。

我国之前的神州飞船,全部是陆地降落,原因就是我国没有办法确保某一片海域是绝对安全的,但这种情况估计以后会慢慢改变,因为我们的航母只会越来越多。
美国倚仗遍布全球的军事基地,在太空探索方面拥有天然的优势,这也是我国必须要想办法解决的一个问题,随着我国深空探索的不断推进,月球也只是一个阶段,以后的道路毕竟还得依靠中国自身的力量走下去。

友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com