




友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com
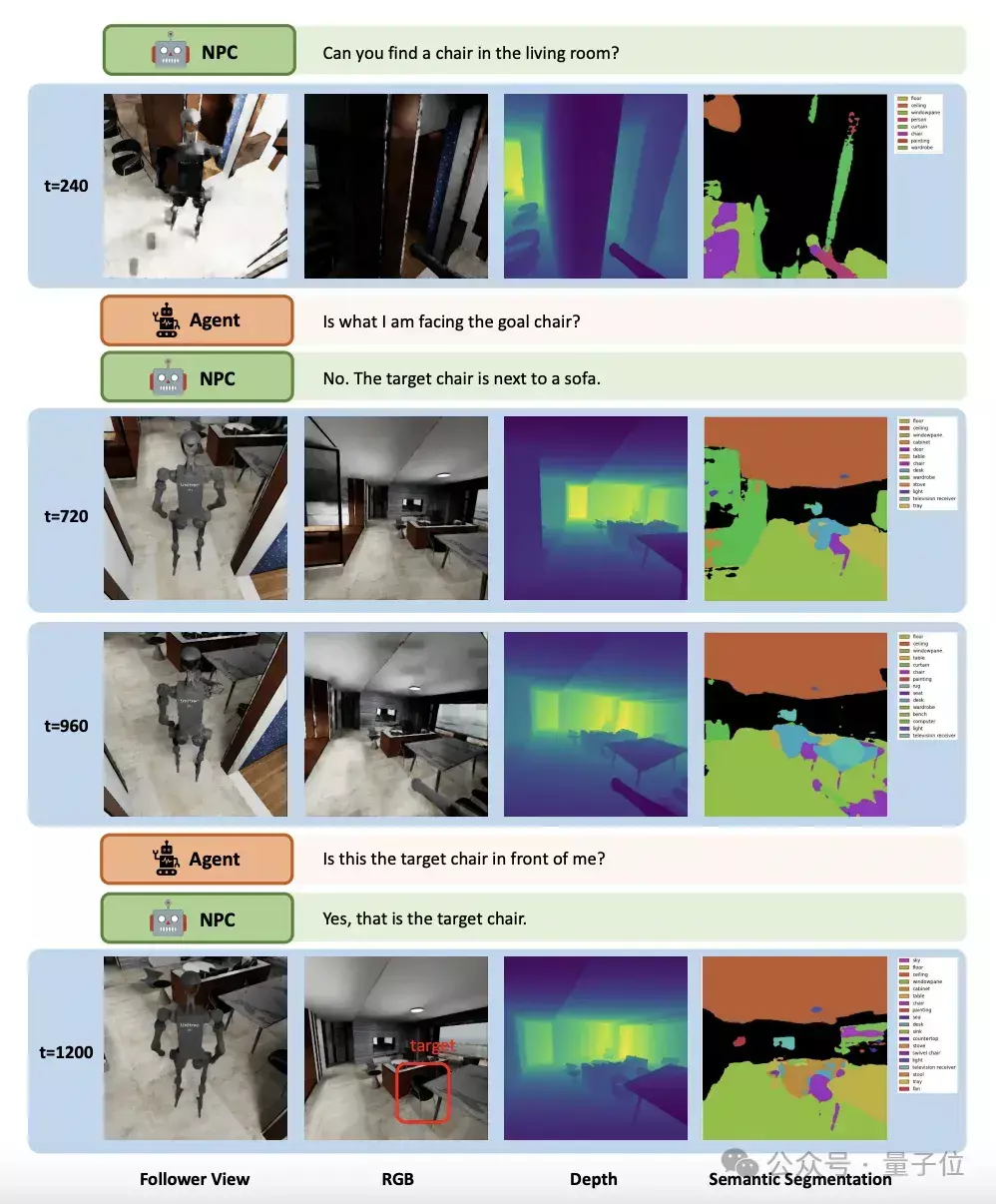
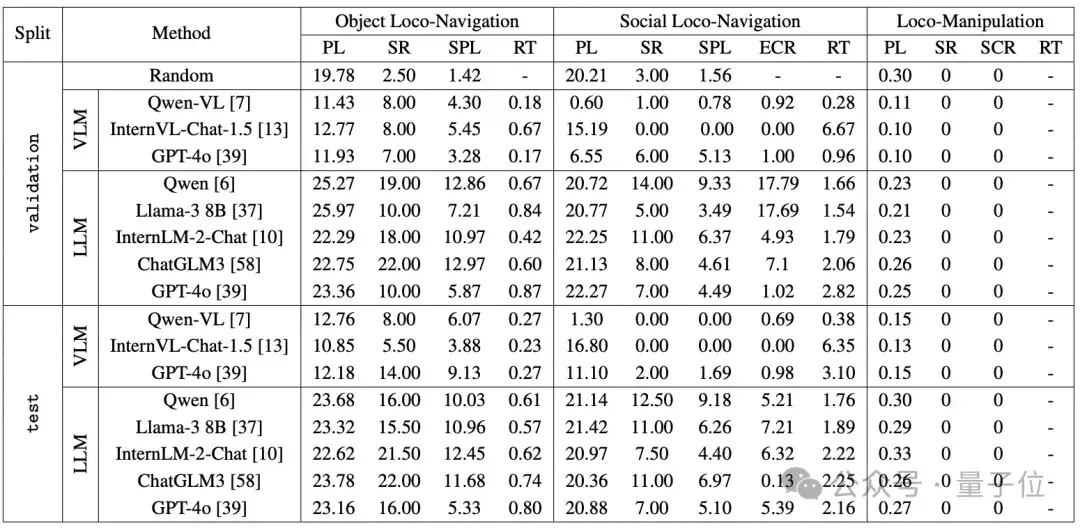
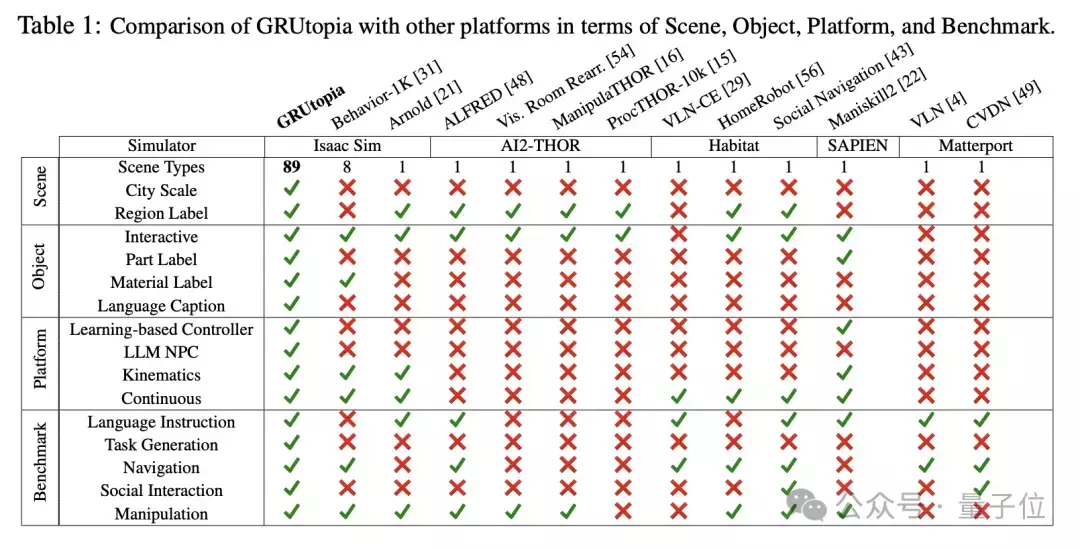
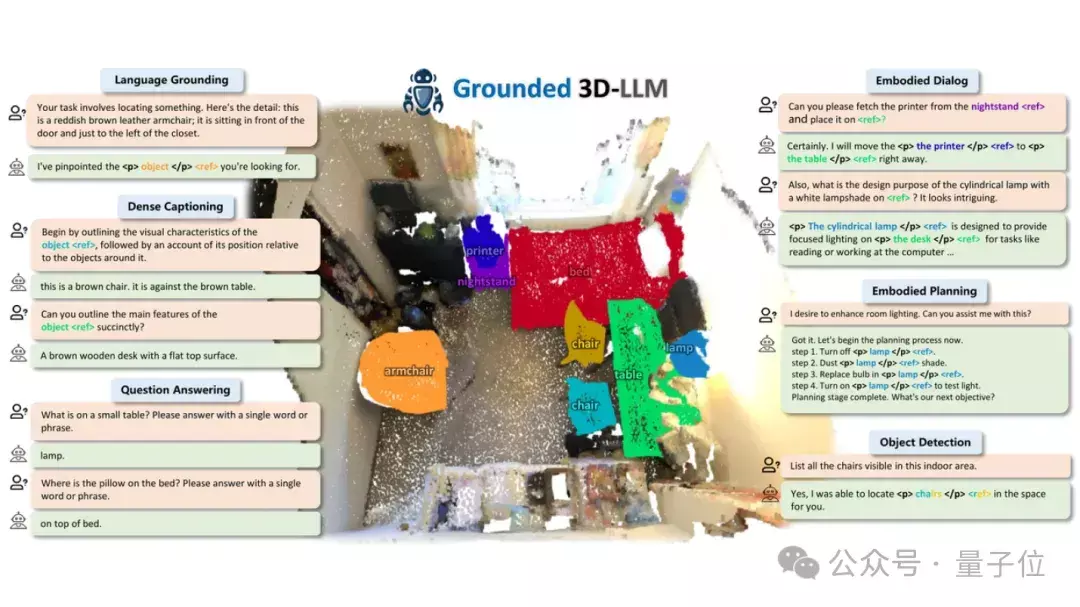
“具身智能小镇”来了!机器人逛超市买菜满街跑,来自上海AI Lab
3
0
相关文章
近七日浏览最多
最新文章
标签云
电动汽车
机器人
国家安全
美国
兵马俑
霍夫曼
基本每股收益
股价
孙悟空
英伟达
宝马集团
大族激光
工业机器人
国产品牌
初创公司
navi
股票
减持
黄仁勋
gpu
cpu
苹果
奥运会
巴黎
奥运
吉利
北航
昆虫
nlp
天眼查
五老星
卡普
路飞
海贼王
草帽海贼团
贝斯特
36氪
运动能力
预告片
nfc
oled
中学
高通
微软
巴菲特
伯克希尔哈撒韦
李佳
上海
王尚文
肯德基
周教授
小巷人家
治疗
hpv
误诊
医院
广州
黄玲
苏州
广东
庄筱婷
杭州
快乐
菩萨
万圣节
钓鱼
松江
影视
足迹
电视剧
摄制组
后期制作
贷款
征信
李建平
银监局
人民银行
商业银行
陈毅
陈云
田国立
破晓东方
香港
徐枫
影后
汤君年
汤珈铖
陈凯歌
浦东新区
台风
防汛
社会
南京
合肥
芜湖
马鞍山
滁州
张江
赤热
张海潮
生活
张琳芃
广州市中华民国
医生
病房
儿童医院
新华医院
picu
意外之死
酒店
桂冠
中国红客
长荣航空
长荣集团
s20
全球变暖
副热带高压
新能源汽车
迎峰度夏
中国队
谷歌公司
雷雨
雷阵雨
韩国
韩国人
网络安全
人工智能
中国电信
松井石根
老照片
刘翔
科创板
ipo
快递
黄金
短裤
搭配
街拍
中超
亚冠
上海申花
广州恒大
北京国安
app