友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com
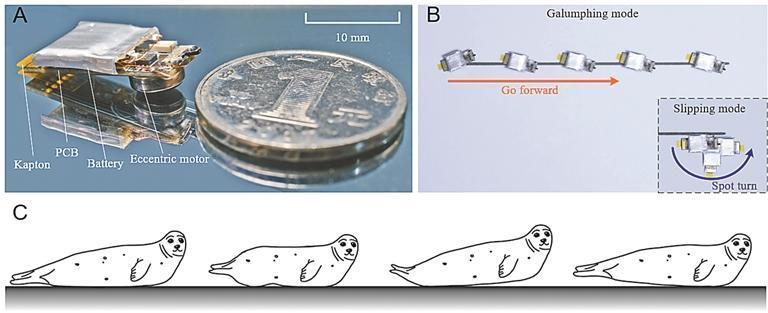
从海豹动作中汲取灵感 哈工大(深圳)团队研发出1.2克微型爬行机器人
29
0
相关文章
近七日浏览最多
最新文章
标签云
罗杰施密特
梦想照进现实
中国
人工智能
美国
机器人
电动汽车
国家安全
兵马俑
霍夫曼
基本每股收益
股价
孙悟空
英伟达
宝马集团
大族激光
工业机器人
国产品牌
初创公司
navi
股票
减持
黄仁勋
gpu
cpu
苹果
奥运会
巴黎
奥运
吉利
北航
昆虫
nlp
天眼查
五老星
卡普
路飞
海贼王
草帽海贼团
贝斯特
36氪
运动能力
预告片
nfc
oled
中学
哈工大
副部长
党委书记
中央委员
陈杰足球运动员
录取分数线
清华北大
叶轻眉
长公主
陈萍萍
庆余年
第一志愿
家长
端午节
研究生
复旦
复旦大学
考研
高考
中国人民大学
北大
清华
成都七中
学霸
清北
高中
高校
投档线
c9
兰州大学
医学部
985高校
本科
中央民族大学
华东五校
投档分数线
湖南大学
西工大
南京大学
王进喜
台湾
二本
985院校
哈尔滨工业大学
自然通讯
航天
月球
哈尔滨工程大学
科技
航空航天
国防科技大学
融资
军衔
王亮
学院
发动机
航空发动机
中国工程院院士
薄如蝉翼
录取通知书
北京科技大学
爱国主义
华中科技大学
液晶仪表
无线充电
ev
海豹
动力总成
新能源汽车
跟着我一起
辅助系统
新能源
pilot
续航里程
磷酸铁锂电池
纯电
智能驾驶
动力系统
冰雪世界
南极
全球变暖
恐龙
驱动电机
雷达
智能互联
蓝鲸
野生动物
动物世界
老友记
蜘蛛
螃蟹
钱德勒
塑料垃圾
喜剧明星
b级车
比亚迪秦
用车成本
ar
涡轮增压
自然吸气
食肉动物
全球气候变暖
雷克萨斯
日本
鲨鱼
大众高尔夫
涡轮增压发动机
哪吒
王传福
phev
马儿